
머신 비전이란 무엇인가 : 각종 제조 및 생산 장비 또는 공정들을 제어하거나 관련 정보를 얻기 위해서 실제의 영상 정보를 자동으로 취득후 분석하기 위하여 광학계 및 카메라 등을 이용하여 비 접촉으로 검사하는 것을 머신비전이라고 한다
-> 생산 제품들의 품질과 공정 제어를 위한 자동화 검사 시스템
머신비전의 응용 분야
(시험예상)
- Guidance : 부품의 정확한 위치를 로봇에 전달하여 위치 보정이 가능(위치 보정) /Wafer Processing /Die Processing
- Inspection: Verify Quality and Assembly -> 제품의 품질 및 조립상태 /특정부품의 유무 판단과 부품의 위치 계산
- Gaging : 물체의 크기 또는 거리 직경 등의 계측에 사용합니다. 3개의 점을 통해 원을 그릴 수 있다.
- Identification : 생산된 제품이 어떤 제품인지 또는 어떠한 일련번호를 갖고 있는지 인식 -> OCR/OCV/2D/Barcode
OCR : Optical Character Recognition : 일련번호가 어떻게 되는지 ?
OCV : Optical Character Verification : 그 일련번호가 맞는지 ?
OCV는 단순히 F라는 글자모양이 맞는지만 확인 하면 되지나 OCR은 숫자하나 하나를 다 경우의 수에 맞게 확인을 해야되서 복잡하다.
G.I.GI. -> 머신비전이 할 수 있는일은 4가지 안에서 모두 이루어 진다.
로봇산업은 여전히 일본이 우세 : 야스카오 ,ABB, 쿠카 , 현대로보틱스 -> 겨우 한국기업은 한곳
(시험예상)
Image Processing vs Image Analysis(영상처리와 영상 분석)
- Image Processing : Image Enhancement (영상 개선)
영상처리(Image Processing) 란?
카메라를 통해 취득된 영상을 목적에 맞게 수학적인 방법을 이용하여 변환하는 것을 말합니다.
영상처리의 종류 : Point processing, Image arithmetic, Geometric processing, Filtering 등
- meteorology : weather mapping (기상)
- medical : X-rays , CAT scans ,MRI(의료)
- military : spy satellites, target tracking(군사)
- NASA : space exploration(우주 과학)
-Point processing(Masking ,Binarize image)/lmage arithmetic /Geometric Processing / Filtering
- Image Analysis : Machin Vision
Image Analysis :
Pattern Location : Pixel Correlation Search, Geometry Search, Boundary Search, Edge Location, Blob
Measuring : Caliper, Blob, Search, Contour Finder
Recognition : OCR, BCR, 2D, OCV
Inspection : Blob, Subtraction, Edge Tracing
- 부품위치확인
- 문자인식
- 측정
- 검사
Pattern Location (Matching)
카메라로 입력된 영상에서 미리 등록된 패턴과 같은 패턴을 찾는 알고리즘
Pixel Correlation Search
Geometry Search (Ex. COGNEX PATMAX or PATQUICK)
patmax 버전이 patQuick 버전보다 훨씬 비싸고 정확하다
Geometry Search는 패턴을 등록 시 패턴의 경계선을 따르는 Geometry 정보를 가지고 차후 패턴을 찾는 방식으로 Normalized Correlation 방식보다 훨씬 복잡하지만 성능이 훨씬 뛰어납니다.
Normalized Correlation 방식에서는 찾기 힘든 Rotation, Scaling, Image Degradation 등의 정보를 얻을 수 있습니다.
경계선은 아주 세밀한 Segment등으로 구성되며 각각 연결 및 벡터정보를 갖고 있습니다.
이미지 처리는 판단 능력이 없음 이미지 입력 출력 단순한 필터링 정도
이미지 분석은 영상 분석후 결과를 출력 결과값, 위치 , 온도 값 확인 가능
FOV( Field of View): 보이는 영역 : 장면이라 불리우는 물리적인 영역으로 카메라와 렌즈를 통해서 보여집니다.
CCD(활성소자) : 빛의 에너지를 전기적 에너지로 변환합니다. 카메라로 부터 출력되는 신호는 아나로그 입니다.
- Vision Processor에 내장된 특수한 H/W인 프레임 그레버로
아나로그를 디지털로 변환( 개별적인 그레이 값 )합니다.
- 그레이 값들은 픽셀들의 가로, 세로 좌표의 값으로 표현되고
비전시스템의 프레임 스토아 메모리에 저장됩니다.
Pixel 이란 ?
Pixel 혹은 Pel이라 불리는 이단어는 Picture Element 에서 유래 되었으며 영상에 포함된 정보의 가장 최소 단위입니다.
픽셀의 화면의 위치는 (Y,X)로 나타냅니다.
(시험예상)
그레이 레벨(Gray Level) : 각 픽셀의 빛의 밝기(명암)를 표현하는 수치를 나타내는 값으로 이 값은 최소 0에서 255까지(흑백의 경우) 의 정보를 가질 수 있습니다. 이 값에 의해서 실제 화면의 색상이 표현됩니다.
FOV 는 렌즈 와 CCD의 크기에 영향을 받는다 렌즈와 CCD는 크기가 맞아야한다.
허용 공차(오차범위) 는 카메라의 해상도 와 Pixel의 크기에 영향을 받는다.
허용공차는 모든 제품 제조과정에 존재한다. 허용공차의 크기에 따라 비전에서의 카메라 선택을 달리 해야한다.
CAD 상으로 확인한 제품의 길이는 20 mm 이라고 해도 촬영된 영상상으로는 오차 범위가 발생한다. 오차 범위를 0.2mm라고 하였을 때 19.8mm ~ 20.2mm가 정상 범위라고 할 수 있다.
공학 용어에 허용 공차라는 것이 있습니다. 영어로 Tolerance 라고 하는데 일정하고 정확한 수치에 얼마간의 오차는 허용할 수 있다는 것을 말합니다. 조금 모자라도 좋고 조금 넘어도 좋다는 뜻입니다.
예를 들어, 어떤 정확한 길이가 있다고 하고, 이것을 사람이 기계나 도구를 사용하여 만들거나 이행하여 사람이 사용하고자 할 때 사람의 능력으로는 정확하게 만들거나 이행하는 것은 참으로 어려운 일입니다. 이때 얼마만한 차이까지 허용될 수 있는 범위를 공학에서 허용 공차라고 정하고 있습니다.
(시험 예상)
분해능 (resolution) 구하는 공식 : 오차범위 x 1/10
->한 픽셀이 차지하는 실측값을 분해능이라고 한다.
0.2 x 1/10 = 0.02
분해능은 0.02 mm가 된다.
1km = 1,000m = 100,000cm = 1,000,000mm =10,000,000,000 µm
1mm =1000µm
1µm = 0.001mm
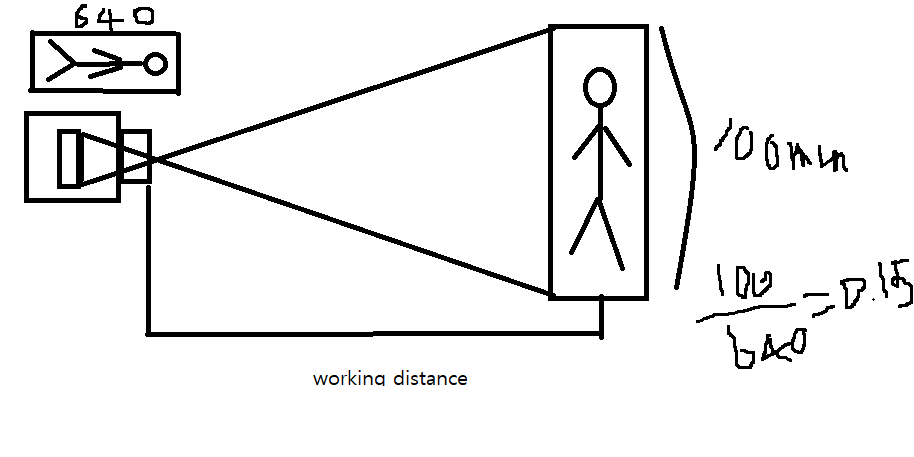
해상도가 640x 480 란말은 CMOS의 PIXEL 갯수를 뜻한다 총 30만개 정도 된다.
CMOS의 X축이 640개인 경우 ,촬영된 FOV의 X축이 100mm 인경우 (X축이 사각형에서 긴축으로 한다)
FOV 의 X축 / CMOS의 X축(Pixel 갯수) = 분해능이다.
100mm / 640 pixel = 0.15mm/pixel
그렇담 공식을 응용할 수 있다
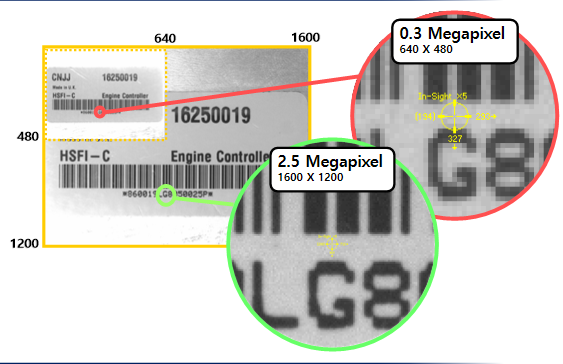
FOV / 분해능 = COMOS (Pixel의 갯수) 구할 수 있다.
24mm / 0.02 = 1200 pixel
1200pixel의 경우 카메라를 2.5 Megapixel 카메라를 사용하면 된다. 250만화소 카메라
분해능과 비슷한 개념의 정확도라는 용어가 있다.
정확도(accurancy)
정확도 : 분해능 x 3~10 pixel -> 현장의 상황에따라서
카메라는 빛의 예술이라는 말이 있다. 카메라에 나타나는 영상은 그만큼 빛에 의해 이루어진다. 빛이 없으면 사진을 촬영되지 않는다. 그래서 제품을 촬영할 때 불필요하고 변동적인 빛은 최대한 배제해주어야한다. 그래서 현장에서는 컨베이어 벨트 위에 암실을 만들어 작업하는 경우가 있다 . 이 경우 정확도는 3 pixel만 곱해주어도 되며 정확도는 높아진다.
만약 공장의 창가나 외부의 다른 빛이 많이 들어오는 공간에서 작업을 하게 될 경우 정확도가 많이 떨지게 된다.
카메라는 촬영한 화면을 pixel이라는 단위로 표현하는데 pixel은 Gray level로 표현되기 때문에 부정확성으로 제품의 규격에 오차가 발생하게된다. 이 경우 유동적이고 변동적인 빛이 관여하게되면 해당 pixel의 기준을 잡는것 조차 어려워져
정확성이 더욱 떨어지게 되는 것이다.
머신비전에 사용하는 카메라들은 CCD(Charge Coupled Device) 또는 CMOS(complementary metal oxide semiconductor) 라는 Imager를 사용하여 영상을 취득하고 그 취득된 데이터를 Analog 또는 Digital 신호 형식으로 Frame Grabber로 전송합니다.
<비월주사(interlaced scanning) = 롤링 셔터>
전체 홀수열 주사 후 전체 짝수열을 따로 주사하는 방식이며,
한 화면을 구성하기 위하여 홀수라인의 주사와 짝수라인의 주사가 각각 이루어집니다.
RS-170의 경우 Field 주파수가 60Hz이므로 홀수/짝수 각 30Hz를 주사하는데 사용하여 초당 약 30회의 이미지 refresh가 가능합니다
고속으로 움직이는 물체를 취득하기 위해서는 Strobing 또는
빠른 Shuttering이 필요합니다.
Field가 서로 어긋날 수 있습니다.
<순차주사 (progressive scanning =글로버 셔터)>
각 열을 순차적으로 주사하는 방식
고속 영상을 취득 시 비월주사방식보다 유리합니다.
Camera Link
Digital 통신 방식의 종류
- GigE = Giga Ethernet :제일 저렴해서 많이 사용 된다. 그냥 케이블 연결 하는 거
- Camera Link
- USB
위 3가지가 있다 . Camera Link 가 제일 빠르다 하지만 Fram Grabber를 사용해야한다.
Camera Link의 장점
Camera Link는 표준 케이블 및 콘넥터를 사용합니다.
Camera Link 는 Analog에 비해 최소 2~4배의 데이터 전송
속도를 갖습니다.
이미지가 카메라에서 디지털화되므로 Pixel Jitter및 전송 중
이미지의 품질이 손상되지 않습니다.
RGB (Red-Green-Blue) : R, G, B를 담당하는 각각의 Photo Detector
들로 구성되며, 이 Detector들이 하나의 Chip에 위치하면 Single Chip
카메라가 되고 각각 존재하면 3 Chip 카메라가 됩니다.
계측 등 좀더 나은 이미지가 필요할 경우는 3 Chip 카메라를 사용합니다.
HSI (Hue, Saturation, Intensity) Color space
대부분의 머신비전에서 RGB보다 더욱
유용하게 사용되는 컬러 포맷입니다.
RGB에서 특정 수식으로 변환하며 실린더
형의 좌표계를 가지고 있습니다.
1 Hz = 1초당 1번 진동
10Hz = 1초당 10번 진동
CCD -Charge Coupled Device
- 감도가 뛰어납니다.
- 넓은 Dynamic Range 를 가지고 있습니다.
- 빠른 Scanning 속도를 가지고 있습니다.
- 전력 소모가 많은 편입니다.
CMOS (Complementary Metal-Oxide Semiconductor)
- CCD 소자에 비해 1/10의 저전력을 소모하며 저가로 제작이 가능합니다.
- 통합회로 집적이 가능합니다.
- 원칩카메라가 가능합니다.
- XY Addressing을 통한 특정부분의 영상 취득이 간단히 가능합니다.
- 초고속 Scanning이 가능(Multi Tap Output)합니다.
- 아주 넓은 Dynamic Range를 갖고 있습니다.
- CCD 보다 이미지 품질이 떨어지는 경향이 있으나 거의 개선된 상태입니다.
Area Scan Camera -100만원
Line Scan Camera -800만원 비싸다
2D가 아니고 1D 영상 취득을 목적으로 합니다.
연속적인 움직임을 가진 제품에 대한 이미지 취득 시에 유리합니다.
매우 큰 해상도의 이미지를 취득할 수 있습니다.
해상도에 비해 상대적으로 저렴한 비용이 듭니다.
설치 및 구성이 복잡하고 모션에 대한 정확한 Tracking이 필요합니다.
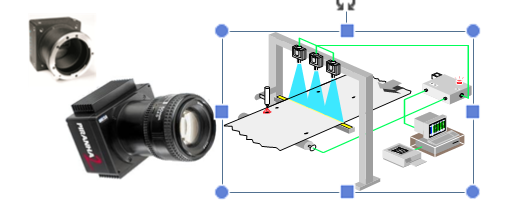
롤러(encoder) 를 설치하여 롤러 한바퀴에 카메라 10번 찍게 하면 롤러 속도에 따라 적절하게 카메라 셔터가 작동을한다.
머신비전에서 조명(Illumination)을 사용하는 목적 :
관심영역 이미지의 조도(Contrast)를 개선하기 위함입니다.
조도 개선을 해야 하는 여러 가지 이유들
그림자의 최소화
이동 물체의 촬영
경계부의 선명도 증가
난 반사 제거
물체와 배경을 뚜렷이 구분되는 Gray Level 로 만듦
조명의 종류
Halogen(자동차 헤드라이트), Fluorescent(형광등), LED, LASER, UV etc.
조명의 방식
Front , Back
Direct , Diffuse(분산)
On-Axis(동축) , Structured
Continuous , Strobe(퐉)
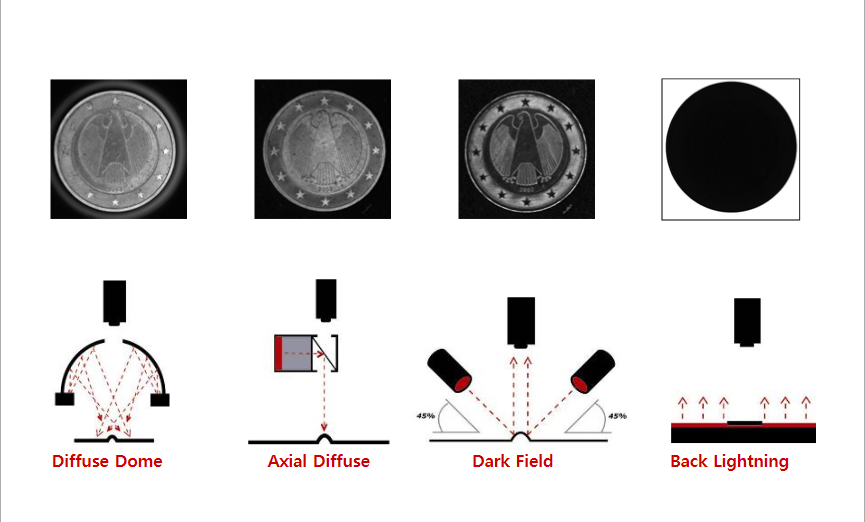
대표적인 표면 검사에는 Bright Field / Dark Field 가 있다.
Bright Field 효과
거울반사를 이용해서 물체의 매끄러운 부위를 밝게 나타나게 하는 것을 bright-field 효과라고 합니다
매끄러운 부위는 빛을 바로 카메라로 반사시키고 화면에는 밝게 나타나며, 매끄럽지 않은 부위는 빛이 산란되며 화면에는 어둡게 나타납니다.
Dark Field 효과
확산반사를 이용해서 물체표면의 결점이나 거친 부위를 강조하기 위한 조명방법을 dark-field 효과라고 합니다.
이런 효과는 거친 영역에 따라 다르며 반사 빛의 일부는 카메라를 향하지만 또 다른 일부는 산란되어 다른 곳으로 흩어지기 때문에 이 영역은 화면에 검게 나타납니다.
이 효과는 아주 작은 흠집을 나타내기 위해서는 아주 강한 빛의
밝기가 요구됩니다.
back lighting
장점 :
물체와 바탕의 최대 대비차(Contrast) 를 제공합니다.
파트의 실루엣을 제공하여 이미지의 단순화
단점 :
물체의 표면 정보 손실 (파트는 검게, 바탕은 하얗게 표현)
표면 내의 검사 등은 백라이트를 사용하지 못하는 경우가 발생됩니다.
응용:
물체의 경계, 홀과 같은 곳의 크기 측정에 유용.
주의 사항 :
조명 표면이 깨끗이 유지되어야 하며,
정밀계측에는 백라이트의 정확한 조사방향이 필요합니다.
diffuse front lighting
장점 :
전 방향으로 부드러운 조사가 되며,
그림자를 최소화하는데 좋습니다.
단점 :
확산조명은 콘트라스트를 약간 떨어뜨리는 경향이 있습니다.
응용 :
반짝이는 금속 표면
3차원적인 제품에 대해 그림자가 문제가 되는 경우
주의사항 :
조명의 위치에 따라 다른 효과가 나타나며,
형광등 또는 광섬유 링 조명등의 튜브형 확산기 사용 가능합니다.
direct front lighting
장점 :
투광 및 점 조명등은 설치 및 사용이 쉬우며,
직접 조사가 되어 이미지에 최고의 콘트라스트를 제공합니다.
단점 :
점 조명은 3차원적인 제품에 그림자를 생성하며,
직접조명은 광택이 있는 제품에서 거울 같은 반사의 원인이 됩니다.
응용 :
낮은 콘트라스트의 이미지에서 콘트라스트의 최대화
움직이는 부품에 스트로보를 사용 정지한 효과를 제공
주의사항 :
그림자를 최소화하기 위해 최소 2 개 이상의 점 조명 사용하며,
때로는 그림자를 Contrast를 증대하는 목적으로도 사용 가능합니다.
on-axis lighting
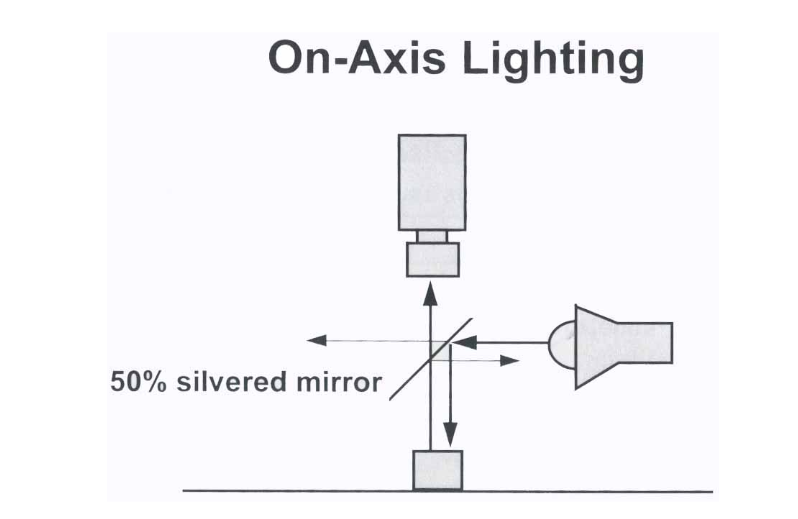
100 -> 유리에 부딪히면서 50 -> 사물에 부딪히면서 25 -> 다시 빛이 카메라로 향하면서 유리에 부딪혀 12.5 의 빛이 카메라로 들어간다.
장점 :
카메라가 일반적으로 설치되어 원근으로 인한 왜곡이 없습니다.
Bright-field 효과를 나타냄(반사면이 밝고, 확산면이 어둡습니다)
단점 :
거울의 두께로 인해 이중상이 만들어질 수 있습니다.
응용 :
반사표면 및 평면에서의 결점 및 흠의 확인
작은 홈의 바닥 조명
주의사항 :
카메라에 입사되는 반사광은 처음의 ¼이 되므로 전체적인 밝기가 떨어질 수 있으며,
대상체의 표면과 거울이 정확히 45가 되도록 설치하여야 합니다.
Structured lighting
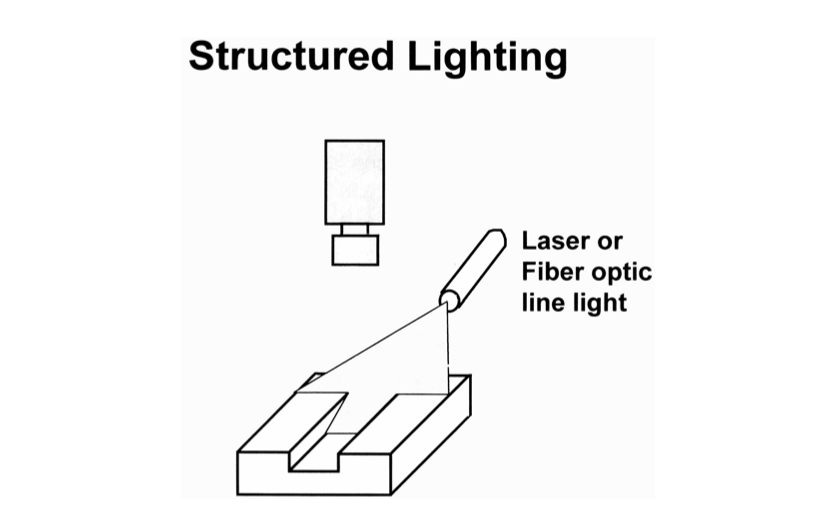
장점 :
저렴한 비용으로 Z축 높이/깊이 측정
아주 낮은 콘트라스트부의 표면 프로파일을 볼 수 있습니다.
단점 :
레이저가 고가이며 적절히 취급되어야 합니다.
빛을 흡수하거나 높은 정밀도를 요구하는 Application에는 적합하지 않습니다.
응용 :
스텝, 갭, 경계등 연속적인 특징의 측정
3차원 부품의 높이 정보가 필요한 경우
아주 낮은 콘트라스트를 갖고 있는 부품(회색 위의 회색, 금속 위의 금속 등)
주의사항 :
가능하면 레이저대신 광섬유 라인조명을 사용하는 것이 좋으며,
여러 가지 패턴의 조명이 사용 가능합니다. : 격자, 점
Polarizing Filter : 편광 필터
창문에 찍힌 나의 모습 물가에 빛이 산란되는 부분을 지워 준다
어디에 주로 쓰냐 비닐 포장된 음식 공정에서 비닐에의해 빛이 반사되는 것을 지워주고 내부의 물건이 잘 들어 갔는지 확인할때 사용한다.
장점 :
직접반사와 확산을 분리할 수 있도록 합니다.
단점 :
필터로 인해 높은 조명강도가 요구됩니다.
응용 :
광택이 있는 부품에 대한 반사광의 양을 조정합니다.
주의사항 :
하나의 필터는 고정하고 다른 하나의 필터를 회전시킵니다.
편광필터들이 서로 교차 시 직접 반사광은 최소화됩니다.
(서로 직각으로 정렬)
렌즈
머신비전에서 사용하는 렌즈는 Optics(광학계) 라고도 하며,
이미지를 카메라에 정확하게 전달하기 위해 사용됩니다.
렌즈는 사용 목적 및 용도에 따라 다양한 종류가 존재하며
Application에 맞는 최적의 렌즈를 사용하는 것은 때에 따라
Project의 성공의 열쇠가 되기도 합니다.
렌즈 선택의 요소들
요구되어지는 분해능에 따라
검사 영역의 크기에 따라
초점 심도에 따라
검사 대상체와의 거리
이미지의 조도에 따라
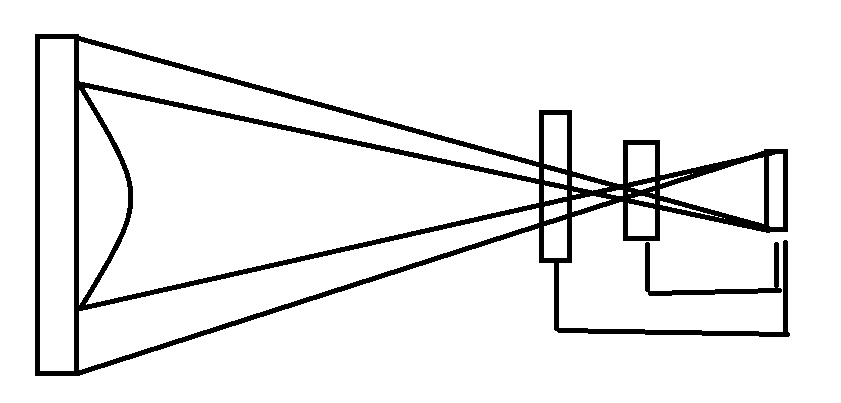
렌즈의 원리
빛은 매질의 밀도가 다른 경계면 에서 휘어지는 특성을 갖는 데, 이를 여러 가지
유리를 이용하여 빛을 굴절시켜 한곳에 모으는 역할을 하는 것이 바로 렌즈입니다.
일반적으로 렌즈의 중심축에서 초점까지의 거리를 초점거리라 하며 f 라고 표현합니다.
렌즈를 통해 카메라에서 볼 수 있는 영역을 FOV (Field Of View)라고 하며,
여러 가지 Application에서 대단히 중요한 요소로 작용합니다.
CCTV 렌즈
저 가격
저 분해능 (20lines/mm)
초점거리를 연장하기 위해 접사링을 사용합니다.
다양한 초점거리 별로 제공됩니다.
저 조도가 요구되는 검사에 적합합니다.
제품 유무 및 일반적인 비전검사에 적합합니다.
예 : Cosmicar, Fujinon, Tamron, Computar 8mm, 12mm, 16mm, 25mm, 35mm, 50mm 등
8 /12/16/25/35/50
렌즈의 종류
Zoom 렌즈
일정범위 내에서 초점거리를 자유롭게 바꿀 수 있는 렌즈로서 몇 개의 단일 초점렌즈를 가지고 있습니다.
초점거리 변경은 렌즈에 부착된 Zoom 조절부를 손으로 돌려 맞추거나(Manual Zoom), 원격제어 모터로 조절(Motorized Zoom) 혹은 몇 개의 초점거리를 미리 기억시켜 두었다가 제어신호입력 시 기억된 초점거리 상태로 변경되는(Preset Zoom) 등이 있습니다.
Telecentric 렌즈 ---- > Gazing을 목적으로 많이 사용 된다. 정확한 측정 ,계측을 위해
일반적인 렌즈는 렌즈에서 떨어지면 떨어질 수록 넓은 면적이 보이는 즉, 화각을 갖고 있으며 이로 인해 3차원적인 물체를 보게 되면 Z 축으로 왜곡이 발생되나 Telecentric 렌즈는 입사되는 화각이 광축에 대하여 평행하게 입사되는 특성이 있으므로 3차원적 물체를 원근에 대한 왜곡 없이 이미지를 화상면에 전달하는 렌즈입니다.
이미지에 대한 왜곡이 적으므로 보다 정밀한 검사가 가능합니다.
다만 피사체의 크기가 렌즈의 직경보다 작아야 합니다.
Hole Size 등의 검사에 유리합니다.
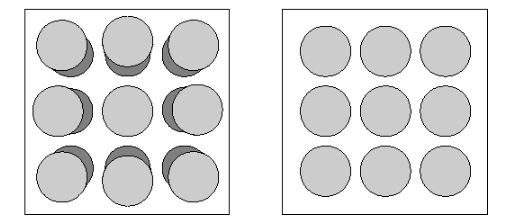
왼쪽은 일반적으로 사람 눈이나 일반 렌즈로 볼때의 모습 사람의 눈은 볼록하기 때문에 사물의 측면도 함께 볼수 있다 .
비전 시스템의 경우 원하는 정보만을 취득하기 위해 홀 모양만 보기 위해 텔레신트릭 렌즈를 사용한다.
렌즈와 cmos 의 거리를 위와 같이 8 /12/16/25/35/50mm로 표시하는데 해당 길이가 멀어지면 FOV의 범위가 줄어든다 !
Embedded Processor 와 Frame Grabber
Embedded Processor (DSP) Board
전용의 화상처리용 Processor가 Board 상에 내장된 형태의 비전보드
대부분의 화상처리를 Board 상의 Processor 가 담당 처리합니다.
PC의 성능에 관계없이 고속의 처리가 가능합니다.
때에 따라 HW, SW의 호환성 문제가 발생할 수 있습니다.
PC의 성능향상에 따라 Frame Grabber Type으로 대부분 전환 되었습니다.
Embedded 란 박아 넣다 심어 놓다라는 뜻이다.
이는 그냥 일반적인 사물에 CPU를 심어 놓는다는 뜻이다. IOT (INTERNET OF THINGS) 머신 비전에도 종류가 있다
- PC based Vision :Cognex ,Halcon , Matrox-> 맞춤형 GUI개발이 가능/ 전문 프로그래머가 필요 /고비용/시간걸림
- Embedded Vision
- 독립형 비전( stand alone) : 키엔스 ,OMRON->한 라인에 많은 카메라가 필요시 유용하게 사용 1개의 Controller에 여러대의 카메라 설치 가능 (일본스타일)/코딩을 모르는 일반인도 간단한 학습후 설치 및 운용 가능 /저비용/낮은 기능/ 시간단축
- 스마트 비전 : Cognex -> 카메라에 cpu가 내장 현장에서는 모니터만 있으면 된다. insight series -> 각각 다른 공정 라인에 설치할 경우 사용 한 카메라에 한 라이센스를 사용하고 개당 가격이 비싸다
Frame Grabber Board
Frame Grabber는 영상의 Capture만을 담당합니다.
일반적인 PC Hardware 및 OS 환경과 호환성이 좋습니다.
최근의 고성능 PC 자원을 사용하여 Image Processing을 합니다.(PC의 CPU를 사용하여 Processing을 하게 됨으로 성능향상이 쉽습니다.)
Application Software 개발이 일반적인 개발환경을 사용하므로 여러 가지 주변장치와 함께 쉽게 통합이 가능합니다.
여러 가지 Interface를 사용하는 카메라와 쉬운 연결이 가능합니다.
대부분 Realtime OS를 사용하지 않으므로 Realtime Application 개발이 쉽지 않습니다.
Stand Alone Type Vision System
보드타입의 Vision System 보다 설치 및 적용이 훨씬 간편합니다.
비전에 대한 경험이 적은 일반인도 쉽게 이해하고 프로그램이 가능합니다.
전용 프로그램 개발환경이 내장되어 있어 Visual Studio 같은 통상적인 언어 개발환경이 불필요합니다.
대부분의 프로그램작업이 화면상의 그래픽이나 메뉴 또는 간단한 스크립트 정도로 이루어져 있으나 보드타입의 프로그램과 거의 견줄 정도로 현재는 파워풀하게 프로그래밍이 가능합니다.
카메라, 프로세서 및 각종 인터페이스가 하나의 케이스에 집적되어 있어 구성이 간단합니다.
각 라인 및 공정에 독자적으로 설치되는 경우가 많으나 하나의 특정 장비에 완벽한 통합이 되어 좀 더 유연성이 필요한 경우는 보드타입이 나은 경우도 있습니다.
비전 Software의 종류 (Vision Tools)
Image Processing Tools
Gaussian Filter, Sobel, Projection, Subtraction, Polar Transformation, Convolutions Morphology
Image Analysis Tools
Pattern Location : Pixel Correlation Search, Geometry Search, Boundary Search, Edge Location, Blob
Measuring : Caliper, Blob, Search, Contour Finder
Recognition : OCR, BCR, 2D, OCV
Inspection : Blob, Subtraction, Edge Tracing
Blob -> 덩어리라는 뜻으로 화면상에 존재하는 비슷한 Gray level pixel 들의 무리를 뜻한다. 이 덩어리를 구분하기 위해서는 조건이 필요하다 . 150 <B < 200 사이의 Gray level을 조건으로 걸면 해당 범위의 Blob을 찾을 수 있다.
고객사를 방문하여 확인해야할것
1.제품의 max 크기
2. 허용공차
3.위치 편차 = 컨베이어벨트 위에서 얼마만큼의 범위로 제품이 움직이는지 확인
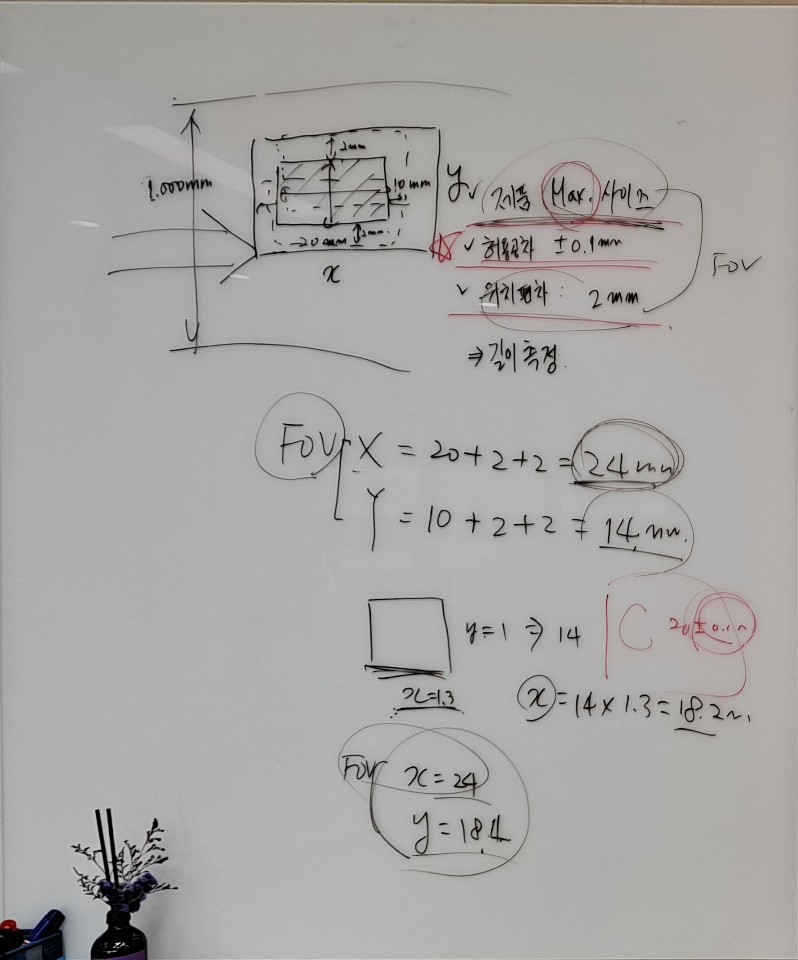
위치 편차만큼 범위를 추가하여 FOV를 예측한다.
CMOS 의 가로세로의 길이 비율은 가로 :1.3 /세로 :1 이다 (평균)
가로 X축을 기준으로 두고 계산을 하면 Y축도 확인가능하고 분해능을 이용해서 계산하면 화소 계산이 가능하다.
(시험예상)
턴키(영어: turnkey) 또는 턴키 방식은 제품을 구매자가 바로 사용할 수 있도록 생산자가 인도하는 방식이다. 디자인-빌드(Design-Build)라고도 한다.
대한민국에서는 보통 설계와 시공을 함께 발주하는 설계·시공 일괄입찰의 뜻으로 쓰인다. 기본설계와 시공의 일괄시행 방식으로, 입찰시에 그 공사의 설계서와 시공에 필요한 도면, 서류를 만들어 입찰서와 함께 제출한다.
'Machine vision' 카테고리의 다른 글
| Cognex 프로그램 In-sight Explorer 처음 사용 하기 ! (0) | 2023.10.12 |
|---|---|
| BASLER CAMERA , COGNEX IN-SIGHT CAMERA 사용법 -점보프레임 (0) | 2023.05.17 |
| 코그넥스 IN-SIGHT EXPLORER 프로그램 FindPatMaxPattern, EditRegion, TrainPatMaxPattern 문법 사용 해보았습니다. (0) | 2023.03.28 |
| PNP ,NPN 타입/ COM: 입출력접점/I/O통신/이더넷통신 (0) | 2023.03.09 |



